當前位置: 首頁 > 工業控制產品 > 運動控制 > 工業機器人 > 直角坐標型工業機器人
發布日期:2022-04-18 點擊率:235
前言
先放一個ROS Industrial一周年剪輯視頻。
ROS已經發布八周年了,在國外科研機構中非常受歡迎。目前,以美國西南研究院為首的幾位大佬開始嘗試將ROS應用在工業機器人中,上面這個視頻就是ROS-I項目一周年的進展情況。
為了說明講清楚ROS,我就從ROS是什么,為什么使用ROS,如何使用ROS三個方面展開。
△出自今年《機器人視覺與應用》課程本人制作的課件
是什么
ROS是Robot Operating System的縮寫,原本是斯坦福大學的一個機器人項目,后來由WillowGarage公司發展,目前由OSRF(Open Source Robotics Foundation,Inc)公司維護的開源項目。
1、首先是一個操作系統
根據wikipedia定義,OSissystem software that manages computer hardware and softwarere sources and provides common services for computer programs。也就是說操作系統是用來管理計算機硬件與軟件資源,并提供一些公用的服務的系統軟件。而ROS也自稱是一個OS。
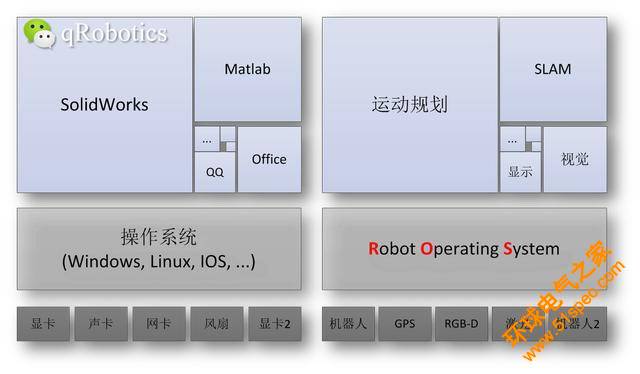
△計算機OS與機器人OS對比示意圖
如上圖所示,計算機的操作系統將計算機硬件封裝起來,而應用軟件運行在操作系統之上,不用管計算機具體應用的是什么類型的硬件產品。這能大大提高軟件開發效率(否則大家只能都寫匯編了)。
同理,ROS則是對機器人的硬件進行了封裝,不同的機器人、不同的傳感器,在ROS里可以用相同的方式表示(topic等),供上層應用程序(運動規劃等)調用。
2、是一種跨平臺模塊化軟件通訊機制
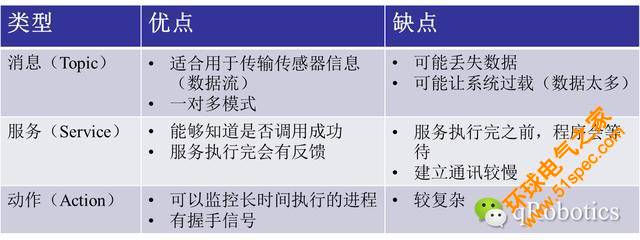
ROS用節點(Node)的概念表示一個應用程序,不同node之間通過事先定義好格式的消息(Topic),服務(Service),動作(Action)來實現連接。
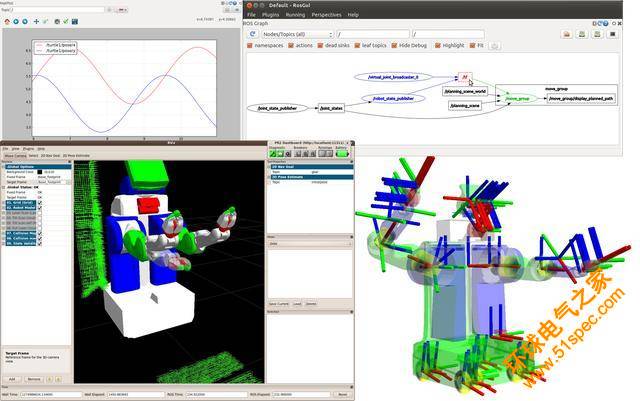
△ROS分布特點
△三種通訊方式的特點
三種通訊方式的優缺點可看上表,由于很多模塊化編程工具都有類似功能,這里就不具體展開了。
下一篇: PLC、DCS、FCS三大控
上一篇: 索爾維全系列Solef?PV


